hellobot
בית
הקורס שלנו - מחולק לפי פרקים
hellobot
בית
הקורס שלנו - מחולק לפי פרקים
בית
הקורס שלנו - מחולק לפי פרקים
רכב/ רובוט מתקדם
רכב/ רובוט מתקדם
רובוט מתקדם
הכנות
1. נראה היכן ממוקמים מנועי זרם ישר של הרובוט.
2. נלמד כיצד לשלוט על המנועים בעזרת בקר המנועים PCA9685PW.
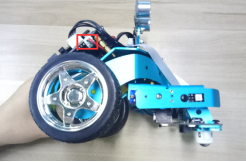
באיורים הבאים ניתן לראות את מיקום מנועי הזרם הישר של הרובוט:
הרובוט נעזר בשני מנועי זרם ישר צהובים ובגלגל אשר מחובר אליהם בשביל לנוע. שני המנועים מחוברים לשני צדדי לוח ההרחבה של המיקרו:ביט.
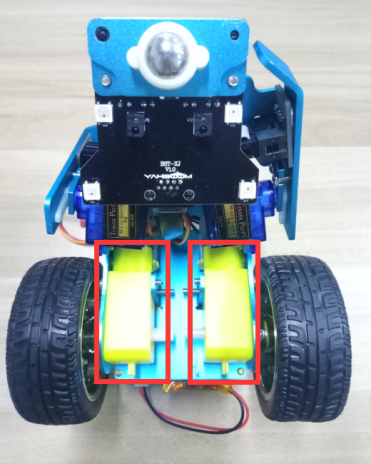
האיור הבא מציג את מיקום המנועים על גבי שלדת הרובוט.
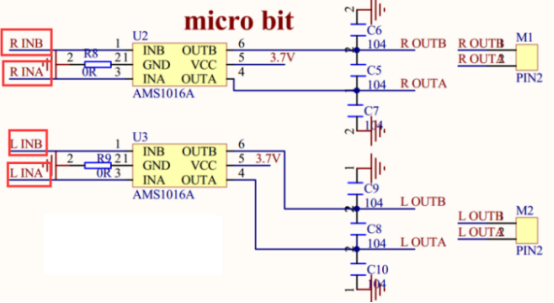
בסכמה הבאה ניתן לראות את החיבורים של המנועים לכרטיס מיקרו:ביט.
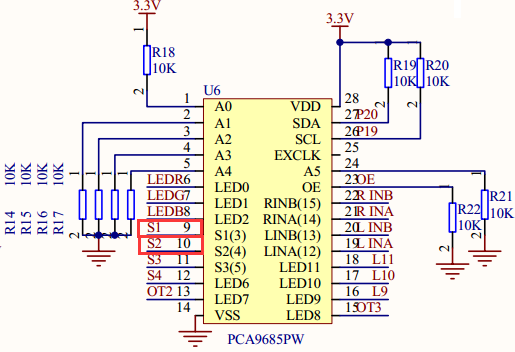
הסכמה הבאה מתארת את החיבורים של בקר המנועים PCA9685PW.
מהסכמות ניתן לראות ששני מנועי הזרם ישר מחוברים להדקים LINA(12), LINB(13), RINA(14), RINB(15) של בקר המנועים PCA9685PW.
בקר מנועים PCA9685PW הוא בקר 16-סיביות בעל ממשק I2C. כל הדק יכולל לפלוט אות PWM באורך 12-סיביות.
בשביל לקדם את הרובוט יש צורך לשמור את הדקי LINA(12) ו-RINA(14) בגבוה.
ואת הדקי LINB(13) ו-RINB(15) בנמוך.
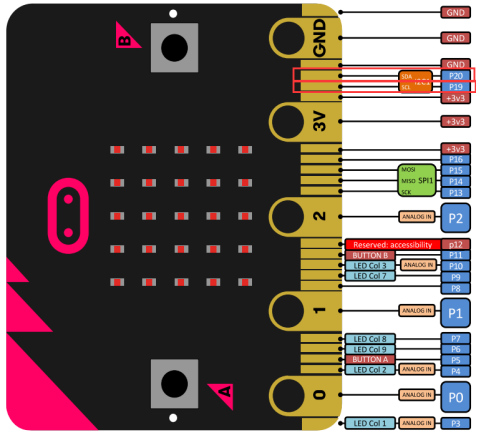
בקר המנועים PCA9685PW מחובר להדקי I2C של כרטיס מיקרו:ביט, הדקים P19 ו-P20.
האיור הבא מציג את הדקי I2C של כרטיס מיקרו:ביט.
מטרות לימוד
בשיעור זה נראה כיצד לקדם את הרובוט קדימה.
מבנה תוכנית
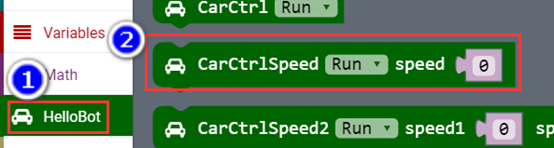
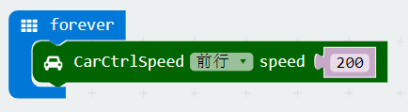
התוכנית שלנו תכלול את הבלוק הבא:
התוכנית שלנו
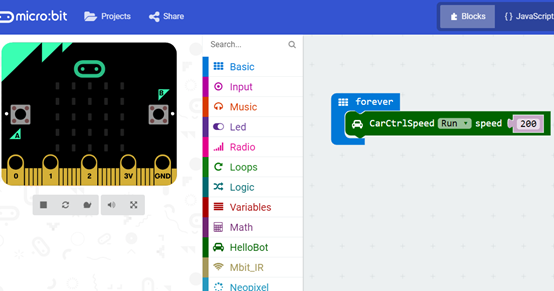
האיור הבא מציג את התוכנית המלאה:
העלאת קוד
וודאו שכרטיס המיקרו:ביט מחובר למחשב. לאחר מכן לחצו
Download
בפינה השמאלית התחתונה בממשק MakeCode ובצעו העלאה לכרטיס מיקרו:ביט.
תוצאה סופית
לאחר שהתוכנית עלתה לכרטיס. הרובוט יתחיל להתקדם קדימה.
להורדת קוד הניסוי:
Advance.rar
.