1. נראה היכן ממוקם מודול העקיבה של הרובוט. 2. נלמד את עקרון הפעולה של חיישן עקיבה.
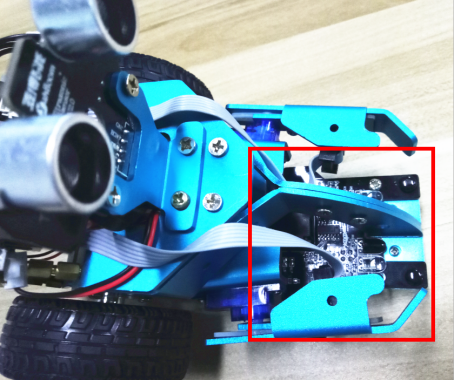
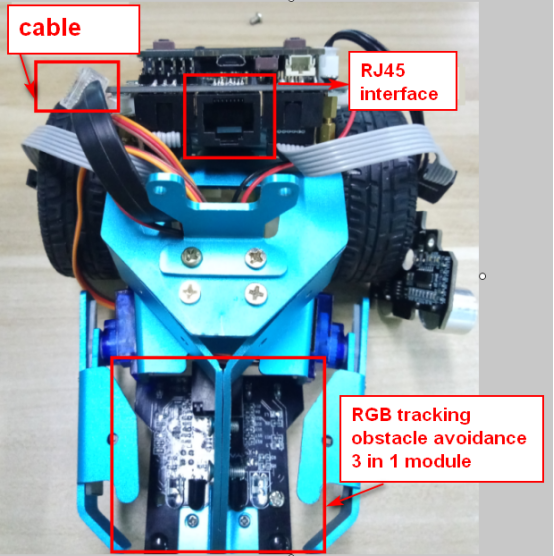
באיור הבא ניתן לראות את מיקום חיישן העקיבה.
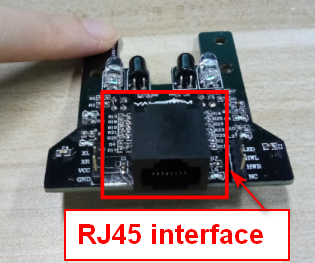
האיור הבא מציג את ממשק RJ45 של חיישן העקיבה.
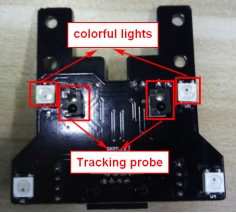
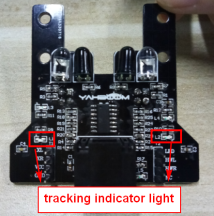
באיורים הבאים ניתן לראות את שתי צדדי הלוח של מודול העקיבה.
מודול העקיבה מותקן מתחת לרובוט ויש צורך לחבר אותו בעזרת כבל רשת.
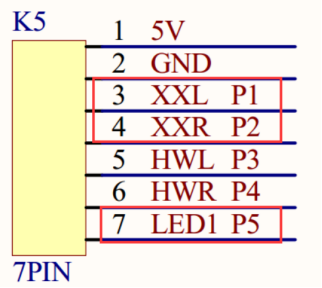
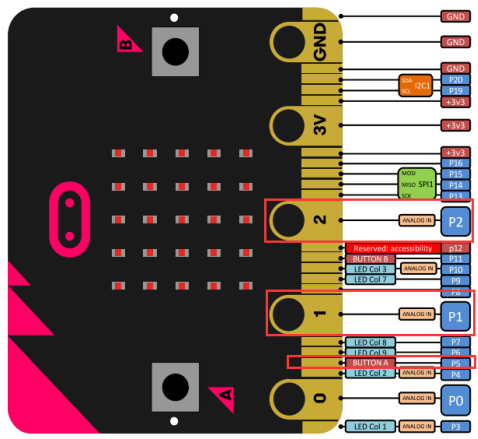
הסכמה הבאה מתארת את צורת החיבורים שלו עם כרטיס מיקרו:ביט.
עקרון הפעולה הבסיסי של חיישן עקיבה מבוסס אינפרה-אדום הוא לקלוט את ההשתקפות של אובייקט מסוים. כאשר מחיישן העקיבה נפלט קרן א"א על קו שחור, הקרן תחזור חלשה יותר לעומת כאשר הקרן נפלטת על אובייקטים בצבעים בהירים יותר. כאשר חישן העקיבה מאתר צבע שחור הנורה לו תדלוק וכאשר הוא מאתר צבע בהיר היא תהיה במצב כבוי.
לפי עקרון פעולה זה מתכנתים את פונקציית העקיבה של הרובוט בהתאם.
הערה: חיישן העקיבה אינו עובד כראוי בתנאים חיצוניים בגלל הפרעות אור. יש לבצע שיעור זה במקום סגור ללא אור שמש.
מטרות לימוד
בשיעור זה נגדים כיצד לגרום לרובוט לעקוב אחר קו שחור. כאשר הרובוט יזהה קו שחור הוא יציג אור ירוק וכאשר הרובווט יזהה צבע בהיר הוא יציג אור אדום.
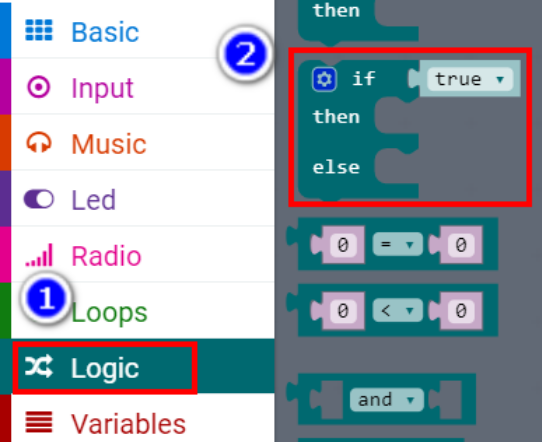
מבנה תוכנית
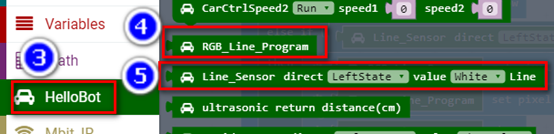
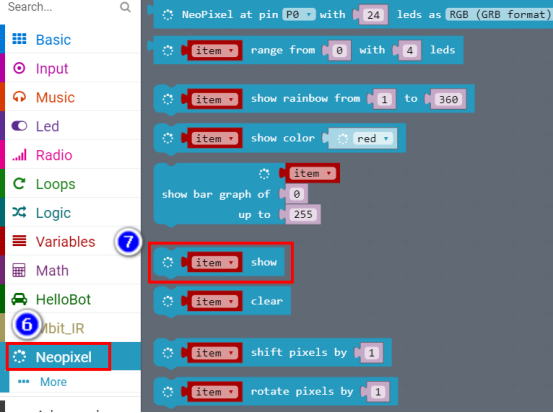
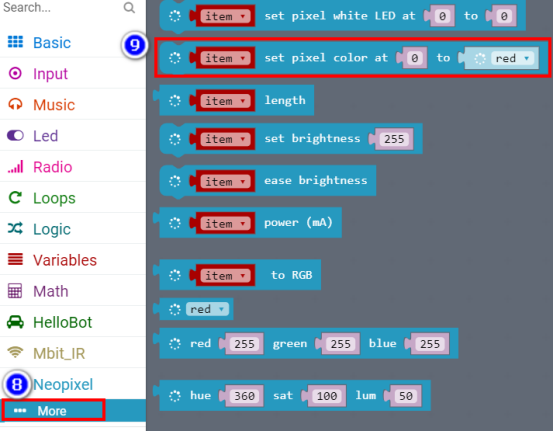
התוכנית שלנו תכלול את הבלוקים הבאים:
התוכנית שלנו
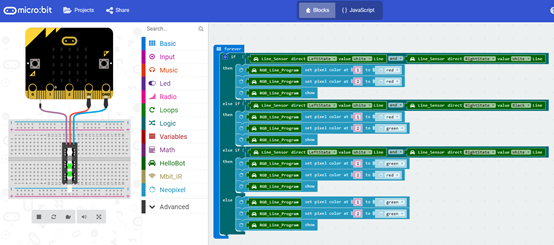
האיור הבא מציג את התוכנית המלאה:
העלאת קוד
וודאו שכרטיס המיקרו:ביט מחובר למחשב. לאחר מכן לחצו Download בפינה השמאלית התחתונה בממשק MakeCode ובצעו העלאה לכרטיס מיקרו:ביט.
תוצאה סופית
לאחר שהתוכנית עלתה לכרטיס, כאשר הרובוט נמצא על משטח בהיר נוכל לראות שהאור נדלק בצבע אדום.
כאשר הרובוט נמצא על משטח שחור נוכל לראות שהאור נדלק בצבע ירוק.
האיור הבא מציג את הרובוט על משטח בהיר.
האיור הבא מציג את הרובוט על משטח שחור.
האיור הבא מציג את פרוב שמאל של הרובוט על משטח שחור.
האיור הבא מציג את פרוב ימין של הרובוט על משטח שחור.