1. נראה היכן ממוקם מודול האולטרה-סוניק של הרובוט. 2. נלמד את עקרון הפעולה של חיישן המרחק אולטרה-סוניק.
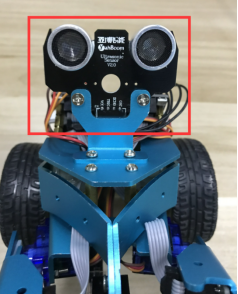
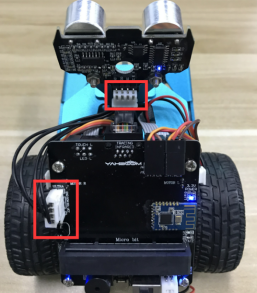
באיורים הבאים ניתן לראות את מיקום חיישן המרחק והחיבור שלו.
הסכמה הבאה מתארת את צורת החיבור של חיישן המרחק לכרטיס מיקרו:ביט.
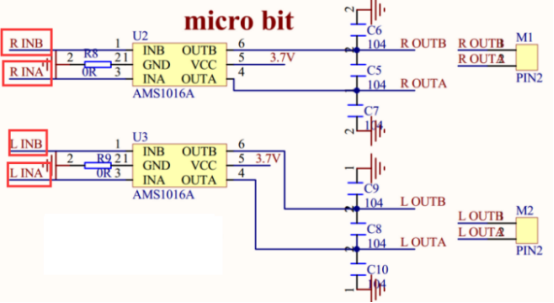
הסכמה הבאה מתארת את צורת החיבור של מנועי הזרם ישר לבקר מנועים.
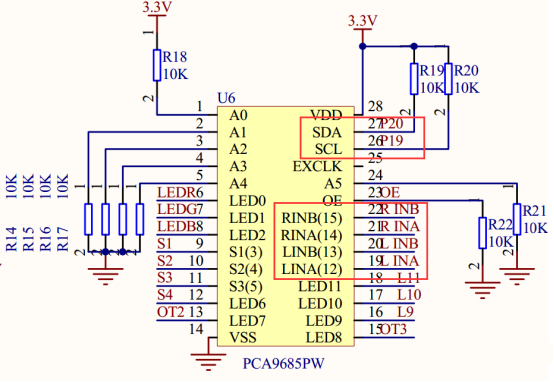
הסכמה הבאה מתארת את צורת החיבור של בקר המנועים לכרטיס מיקרו:ביט.
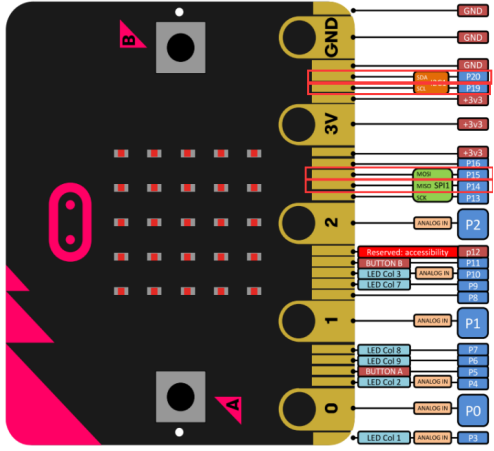
על פי הסכמה ניתן לראות שהדק Trig (SCL) מחובר להדק P14 בכרטיס מיקרו:ביט. הדק Echo (SDA) מחובר להדק P15 בכרטיס מיקרו:ביט.
בקר המנועים PCA9685PW מחובר לכרטיס מיקרו:ביט בהדקים P19 ו-P20 עבור תקשורת I2C. האיור הבא מציג את הדקי המיקרו:ביט שמחברים את חיישן המרחק ובקר המנועים.
צורת עבודה 1. על גבי לוח חיישן המרחק יש שני פרובים המשמשים לשליחה וקבלה של אותות. טווח המדידה של החיישן הוא בין 3 ל-450 ס"מ.
2. בשביל להתחיל את פעולת החיישן, יש לתת להדק Trig אות גבוה למשך 10uS.
3. לאחר מכן, החיישן ישלח 8 אותות בתדר 40KHz ויזהה באופן אוטומטי עם אות כלשהו חזר. שלב זה נעשה אופן פנימי בתוך חיישן המרחק.
4. כאשר החיישן מזהה אות שחזר, הדק Echo יחזיר אות גבוה. משך הזמן בו הדק Echo ישאר בגבוה הוא הזמן בו לקח לאות לחזור. מכאן ניתן לחשב את המרחק לפי הנוסחה הבאה: מרחק = זמן Echo בגבוה x מהירות הקול /2 כאשר מהירות הקול בעלת ערך קבוע של: 340M/S
מטרות לימוד
בשיעור זה נדגים כיצד הרובוט מתחמק ממכשולים בעזרת חיישן מרחק על-קולי.
מבנה תוכנית
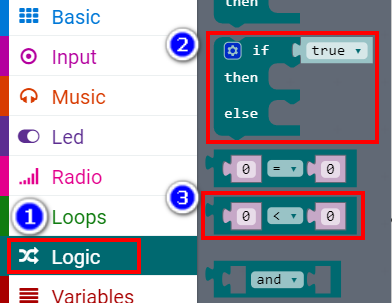
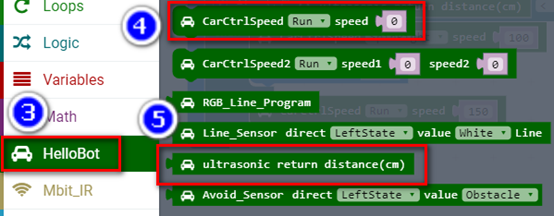
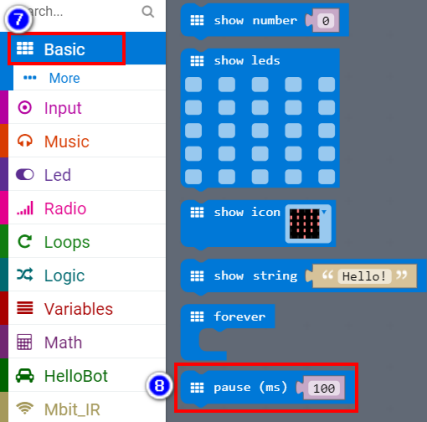
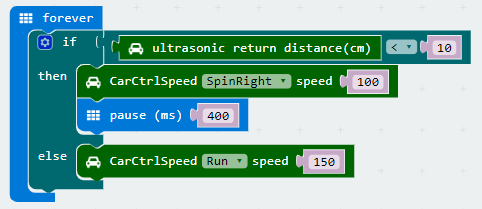
התוכנית שלנו תכלול את הבלוקים הבאים:
התוכנית שלנו
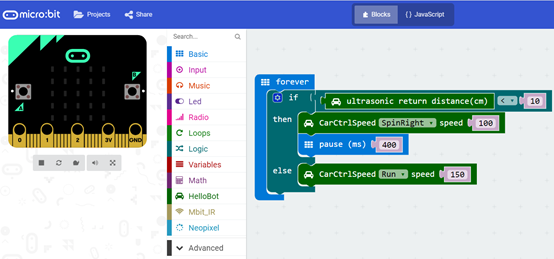
האיור הבא מציג את התוכנית המלאה:
העלאת קוד
וודאו שכרטיס המיקרו:ביט מחובר למחשב. לאחר מכן לחצו Download בפינה השמאלית התחתונה בממשק MakeCode ובצעו העלאה לכרטיס מיקרו:ביט.
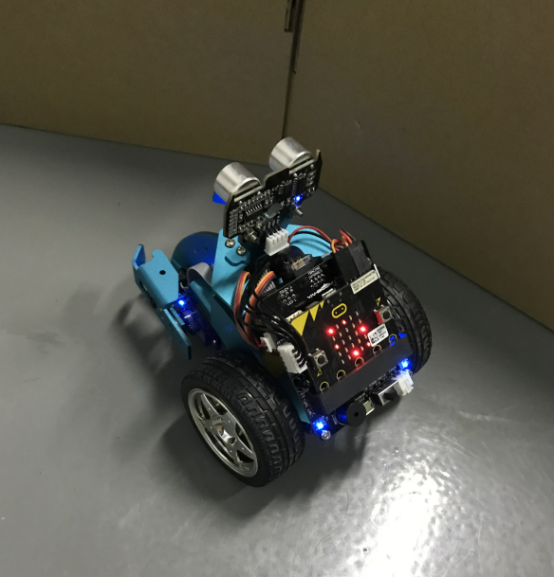
תוצאה סופית
לאחר שהתוכנית עלתה לכרטיס, הרובוט יתחמק ממכשולים בעזרת חיישן מרחק.