1. נראה היכן ממוקם מודול האינפרה-אדום של הרובוט. 2. נלמד את עקרון הפעולה של חיישן מזהה מכשולים אינפרה-אדום.
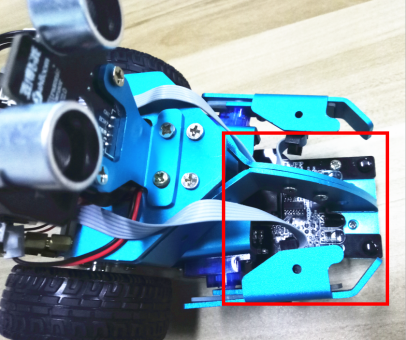
באיור הבא ניתן לראות את מיקום מודול האינפרה-אדום.
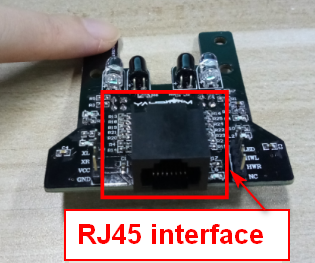
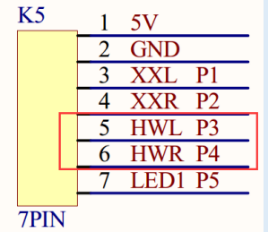
באיור הבא מוצג ממשק RJ45 של החיישן.
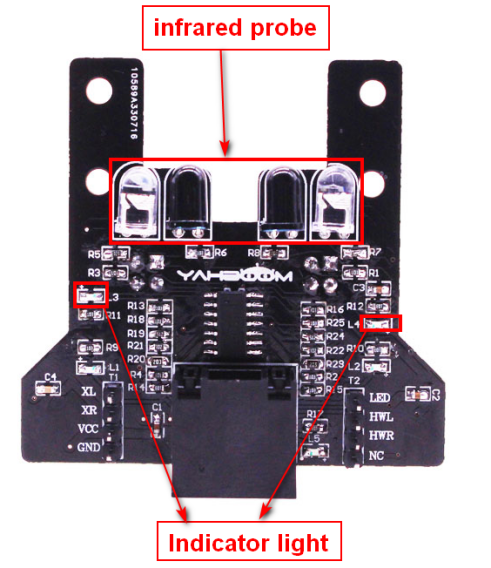
כאשר המודול מזהה מכשול מלפניו נדלק אור חיווי, מתי שאין מכשול אור החיווי נשאר במצב כבוי.
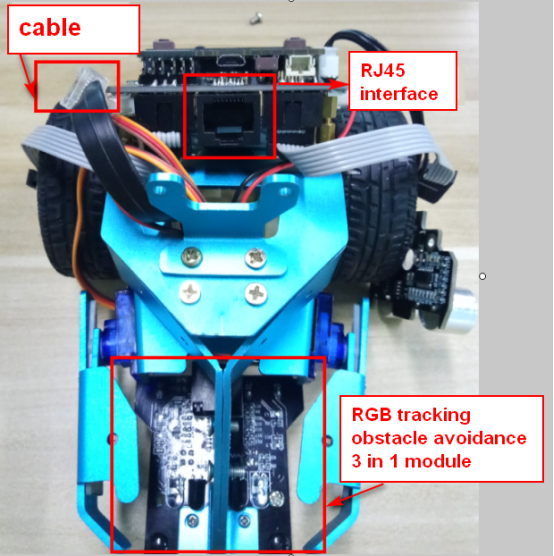
המודול מותקן מתחת לזרוע של הרובוט, יש צורך לחבר אותו בעזרת כבל רשת.
הסכמה הבאה מתארת את צורת החיבור של המודול לכרטיס מיקרו:ביט.
הסכמה הבאה מתארת את צורת החיבור של מנועי הזרם הישר לבקר המנועים.
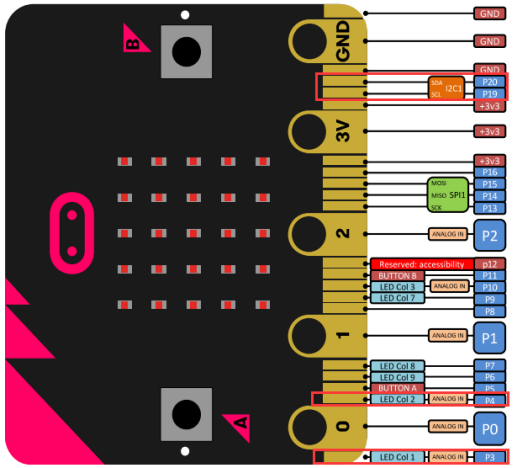
בקר המנועים PCA9685PW מחובר להדקי I2C של כרטיס מיקרו:ביט, הדקים P19 ו-P20. באיור הבא מוצגים הדקי כרטיס מיקרו:ביט.
עקרון פעולה חיישן מזהה מכשולים א"א החיישן פולט קרן א"א וקולט חזרה את הקרן, כאשר הקרן עוברת מעל שטח שחור האור נשאב וחוזר חזרה לחיישן חלש יותר. וכאשר הקרן עוברת מעל שטח בהיר הקרן חוזרת כמעט באותה עוצמה בה נפלטה.
הערה: חיישן העקיבה אינו עובד כראוי בתנאים חיצוניים בגלל הפרעות אור. יש לבצע שיעור זה במקום סגור ללא אור שמש.
מטרות לימוד
בשיעור זה נדגים כיצד לגרום לרובוט לזהות מכשולים מלפניו.
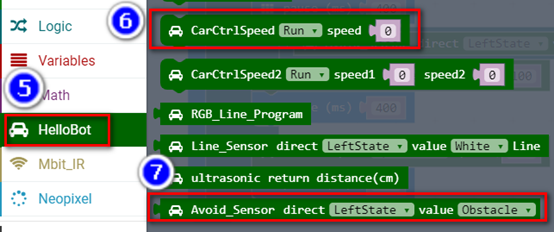
מבנה תוכנית
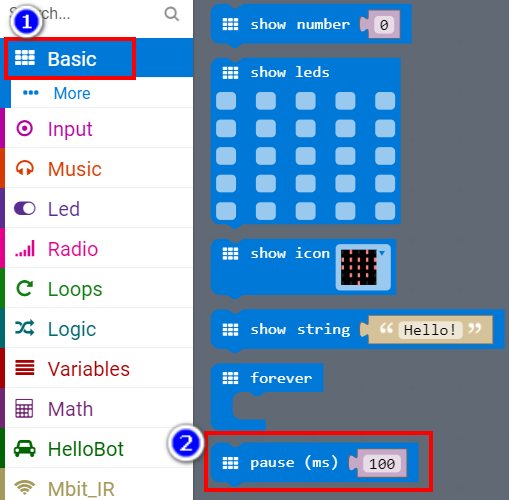
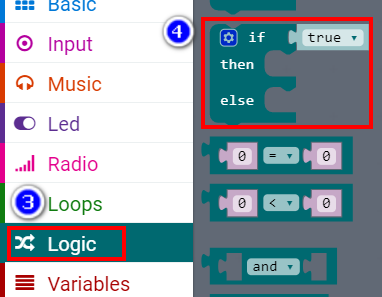
התוכנית שלנו תכלול את הבלוקים הבאים:
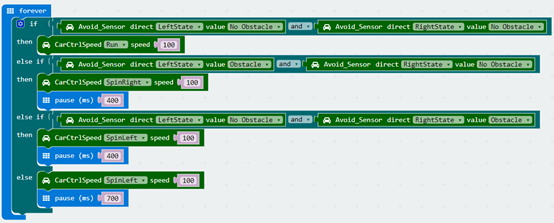
התוכנית שלנו
האיור הבא מציג את התוכנית המלאה:
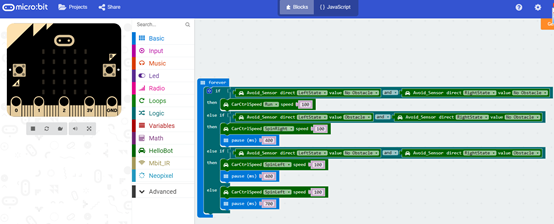
העלאת קוד
וודאו שכרטיס המיקרו:ביט מחובר למחשב. לאחר מכן לחצו Download בפינה השמאלית התחתונה בממשק MakeCode ובצעו העלאה לכרטיס מיקרו:ביט.
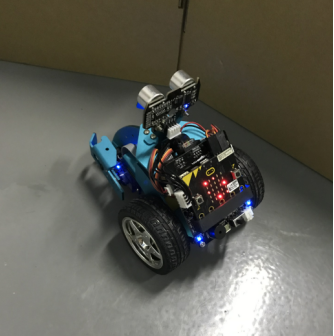
תוצאה סופית
לאחר שהתוכנית עלתה לכרטיס, נוכל לראות שכאשר יש מכשול מלפני הרובוט, הרובוט יסתובב ימינה בשביל להתחמק מהמכשול. במקרה ויש מכשול מצד ימין הרובוט יתחמק שמאלה.